干货!满满的干货!nanoScan3 用于SLAM的测评
发布时间 : 2020-04-26
今天分享一篇干货含量极高的测评。两个主角分别是:仙知SRC系列核心控制器和SICK最新安全激光雷达nanoScan3。
nanoScan3 是仙知SRC系列核心控制器新适配的激光雷达,那么这款nanoScan3激光雷达究竟如何,仙知请出了技术大拿对其进行专业的测试。
本期干货分享,将会详细介绍如何将nanoScan3接入仙知 SRC-2000(S) 控制器并完成SLAM应用测试。
【一 产品配置】
NanoScan3产品Safety Designer 的配置,这个步骤大家已熟知,此处省略一百字。
【二 接入仙知 SRC 系列核心控制器】
SRC系列核心控制器是为移动机器人(AGV、AMR、自动叉车等)设计的通用控制器,为移动机器人提供了核心的地图构建、定位导航、模型编辑等功能。
控制器适配多款主流的激光雷达,并提供丰富的I/O、CAN、RS485等接口用于接入各种传感器和驱动器设备。
通过仙知一站式实施工具Roboshop Pro 客户端软件配置 SRC 所接入的激光设备,如下图:
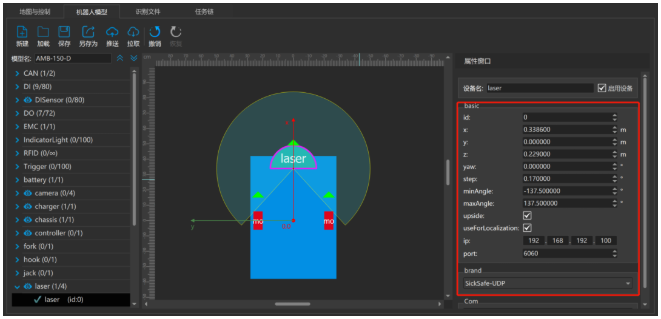
nanoScan3 的扫描范围为 275°,所以左右的扫描角度范围可配置为[-137.5°,137.5°] ,角度分辨率 step 为 0.17°。
【三 SLAM 应用测试】
干货重点内容来了!
01 SLAM 建图效果
完成 nanoScan3 的接入后即可开始 SLAM 建图,我们采用常规的建图方式,即绕现场环境兜一圈使地图形成闭环,过程如下:
▲ SLAM建图过程 ▲
建图时的运行速度为 1m/s,角速度 30°/s。简单擦去地图中的动态物体后得到的地图如下:
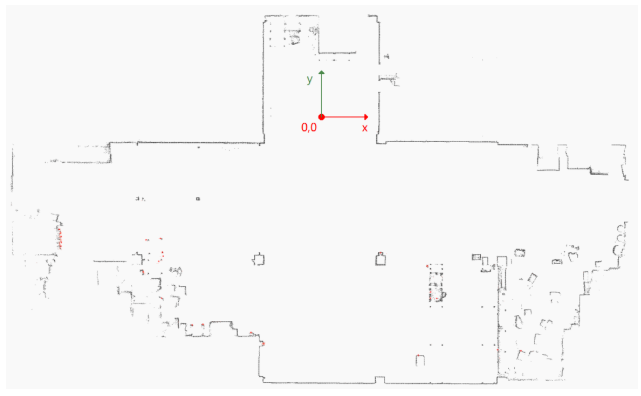
通过放大细节可以看到,使用 nanoScan3 构建的地图墙面笔直、厚度较薄,并且没有任何重影现象。

▲ nanoScan3构建地图效果 ▲
02 实际有效距离测试
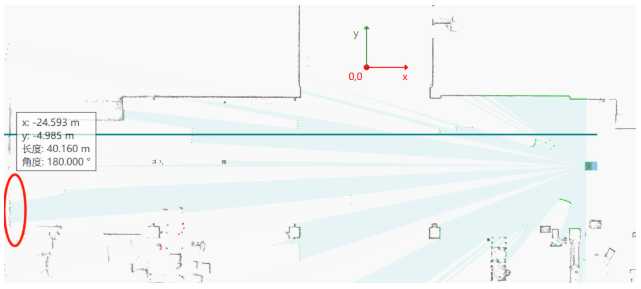
nanoScan3 标称的最远有效距离为 40m,实际测试中距离机器人 40m 处的墙面可以明显获得正确的激光数据反馈,如下图:
03 测距稳定性测试
测距的稳定性我们取远距离、中距离、近距离三种情况。
远距离(>30m)
通过动图可以看到,nanoScan3 在远距离测距方面十分优秀,数据的跳动基本在两个地图点之间(约2cm),性能远超同类的产品。
中距离(约10m)
nanoScan3 中距离的数据跳动基本可以忽略(<1cm)。
近距离主要考察数据的准确性,若激光处理不好则会导致噪点的产生,从而无法正确还原物体的形状,这里使用一个直角面的物体进行测试。
近距离(<0.1m)
可以看到 nanoScan3 完好的还原了物体的形状,没有因为激光噪点而使直角变形,数据的跳动也非常小。
04 对黑色物体的检测
nanoScan3 是一款安全产品,其对黑色物体的检测标准非常高,可以检测到反射率为 1.8% 以上的物体。
我们使用分别为 70mm 和 200mm 直径的灰黑色圆柱体进行测试:

▲ 直径分别为70mm 和 200mm ▲
激光距离圆柱体为 10cm的情况
激光距离圆柱体为 3m的情况
可以看到, nanoScan3 在不同距离处对灰黑色物体的检测也非常稳定,比较好的还原了物体的形状,并且没有出现产生无效数据点的情况。
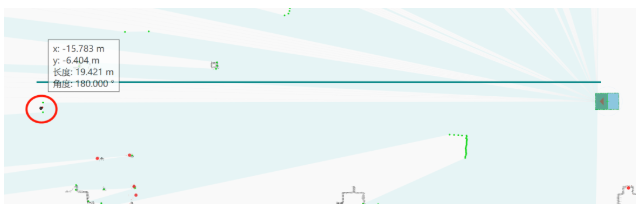
05 对反光物的检测
反光物体测试使用仙知专用充电桩进行测试,主要测试在不同距离下nanoScan3 得到的反射率是否稳定,下图红框中即为 3M 反光条,长度为 18cm。
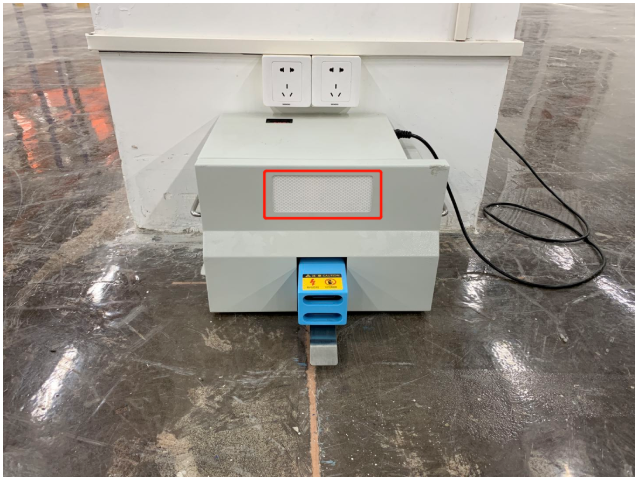
▲ 红框内:长度为18cm的反光条 ▲
激光距离反光条 10cm 的情况
上图中红色的激光点比绿色的激光点反射率高,说明激光检测到了条状的反光物,并且反光物呈直线,没有出现变形和噪点。
激光距离反光条 2m 的情况
可以看到,2m 处条状反光物依然明显,激光数据中反射率保持稳定。
由此可见, nanoScan3 数据反射率的稳定性是非常优秀的,不会出现近距离时反射率数据不稳定的情况,显著优于市面上同类型的激光雷达,这对识别反光物体的相关应用是非常友好的。
为了测试反光柱检测的最远距离,使用下图中 10cm 直径的反光柱进行测试:

▲ 直径为10cm的反光柱 ▲
经测试,大约在 20m 的范围内,可以稳定的检测到直径为 10cm 的反光柱(保证两个高反光点),下图中的黑色点即为检测到的反光柱。
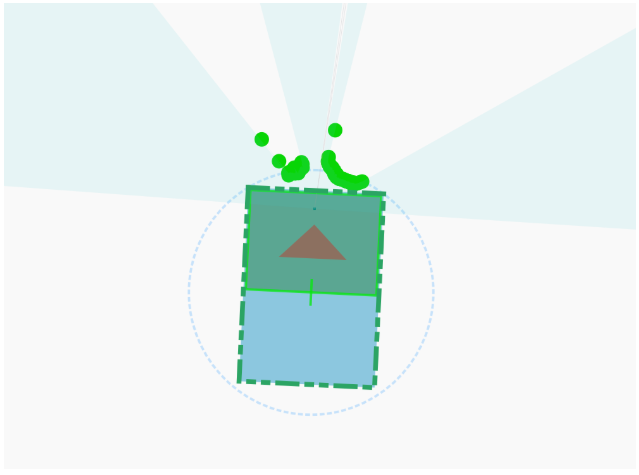
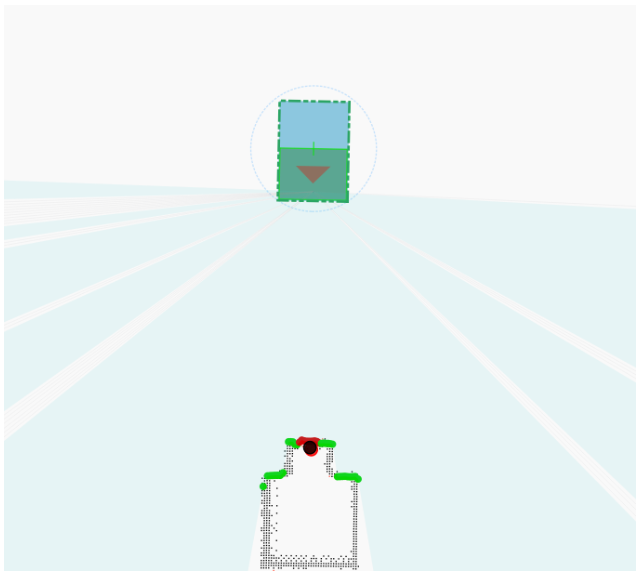
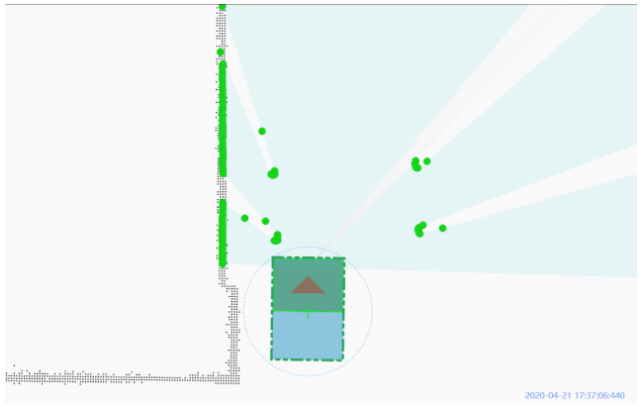
06 前景噪声测试
如下图所示,如果在红点处有柱状的物体,此时激光雷达会有部分本应该扫描到墙面的光束被该柱状物体挡住,由于激光的光束并不是一个点,而是一个有大小的光斑,所以就会出现有半个光斑打在墙面,另外半个光斑打在前面的柱状物体的情况。这种情况下,激光的前景噪声就产生了。
▲ 产生激光前景噪声 ▲
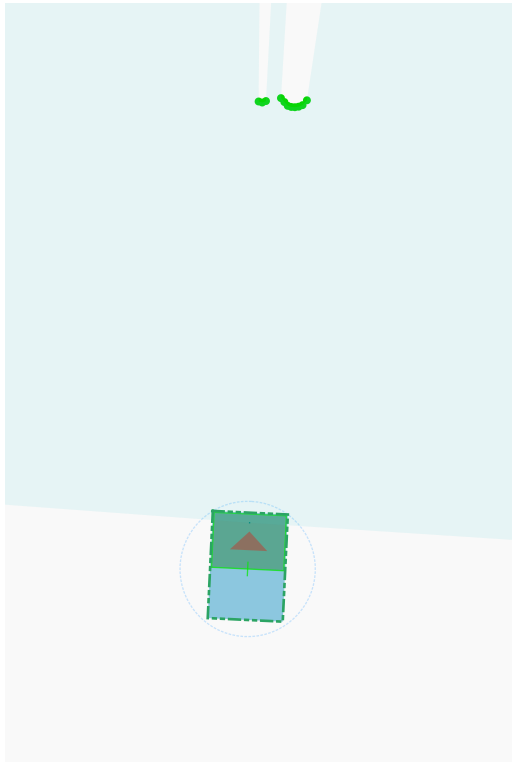
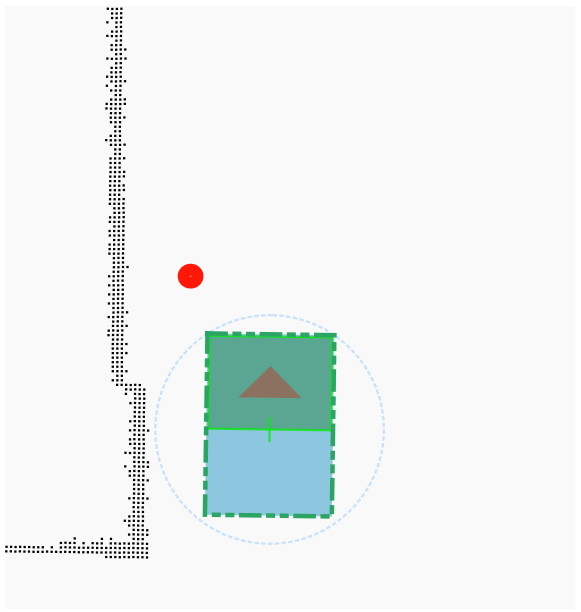
如下图为其他品牌的激光雷达产生严重前景噪声的情况,该情况会直接影响到潜伏牵引机器人的正常工作。
▲ 其它品牌测试情况 ▲
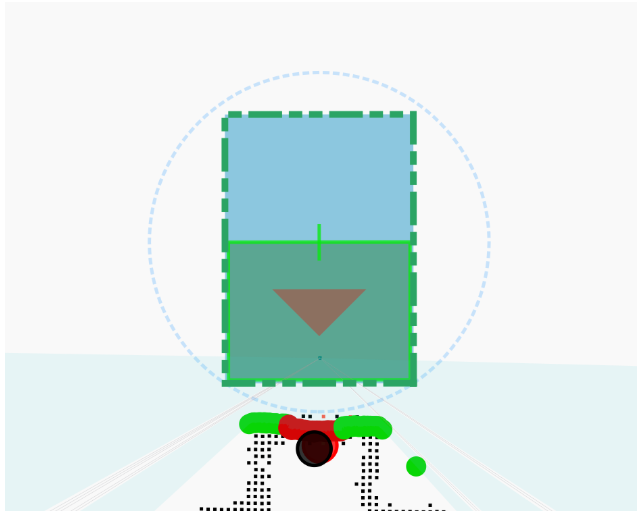
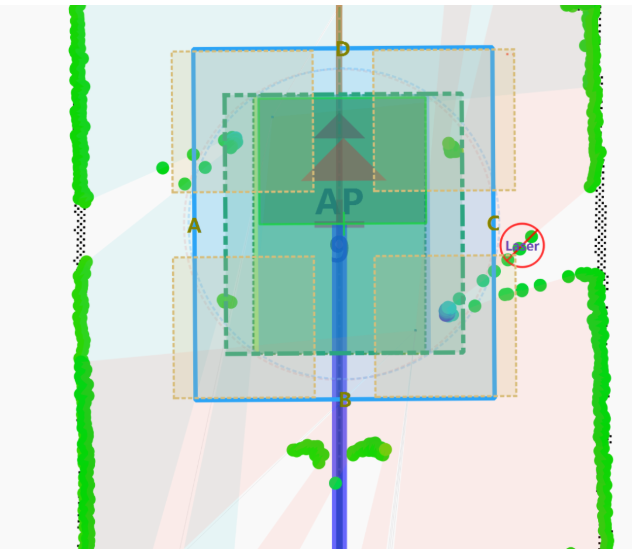
我们模拟了类似的情况,对 nanoScan3 进行了测试:
▲ nanoScan3测试情况 ▲
从以上动图可以看到,nanoScan3 虽然产生了前景噪声,但是在一个方向只会有一个噪点,对实际的应用没有特别大的影响。这,得益于 SICK 的safeHDDM?高精度测量专利技术。
【四 总结】
经过深度的测试,仙知认为 SICK 的新品 nanoScan3 是一款非常优秀的产品,其优越的性能有助于 SLAM 技术能更好的应用于移动机器人上。并且 nanoScan3 是一款兼顾安全功能的产品,配合 SICK 的 Flexi soft 套件和仙知的 SRC-2000(S) 控制器,可以快速的搭建满足 CE 安全标准的移动机器人产品。
有关仙知
仙知机器人,是一家以移动机器人控制与调度为核心的高新技术企业。作为一站式移动机器人方案专家,仙知机器人掌握了具有自主知识产权的移动机器人核心技术,并在工业自动化领域内拥有丰富的项目经验。仙知机器人致力于服务各行业集成商,并为其提供包括移动机器人控制、调度与信息管理在内的一站式移动机器人解决方案。
目前,仙知机器人的产品、技术及解决方案已在汽车制造、家电制造、3C电子制造、半导体制造、食品烟草、电商仓储、安防巡检、商用服务、医疗教育等领域广泛应用。
仙知机器人积极践行企业使命—“让智能创造价值”,不断坚持技术创新,并以开放包容、合作共赢的姿态携手合作伙伴,最大程度地满足客户对产品、技术与解决方案的高品质追求,力争“成为机器人产业的创新者与引领者!”