
最新新型灵活可变型折纸机器人诞生
发布时间 : 2020-04-14
多结构,多种类的新型机器人层出不穷,近期宾夕法尼亚大学的研究人员受折纸艺术启发,创造出一种灵活的“软”弹簧折纸机器人,该机器人的名字叫REBO,通过折纸波纹管图案的几何设计实现了弹性轴向顺应性,从而降低材料重量并减少能量损失。
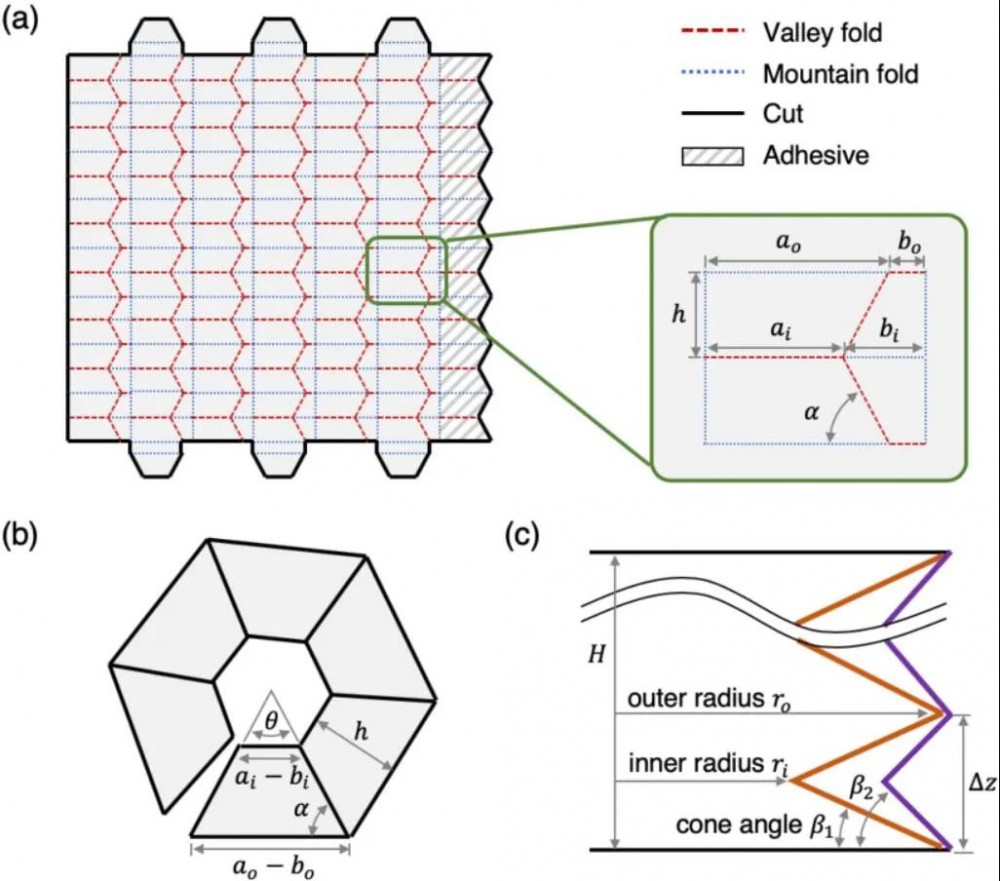
研究团队设计了波纹管的折叠图案,按照图案折叠可产生类似于弹簧的结构。β是折叠后每层的侧面和底面之间的锥角,通过设计和更改锥角的大小,可以控制REBO致动器的刚度。
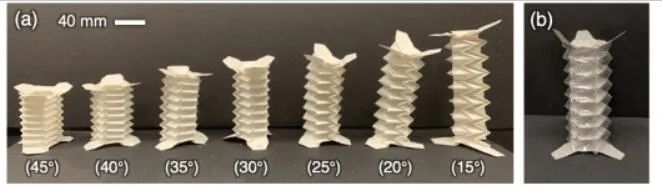
在一定范围内,锥角越大,致动器的刚度越强。当锥角为45°时,致动器的刚度最大为750Nm-1。在此基础上,研究团队进行了双层结构设计,透明外层按照相同图案折叠以将其包围,经过压缩测试后证明,具有双层结构的致动器的刚度是单层的两倍。
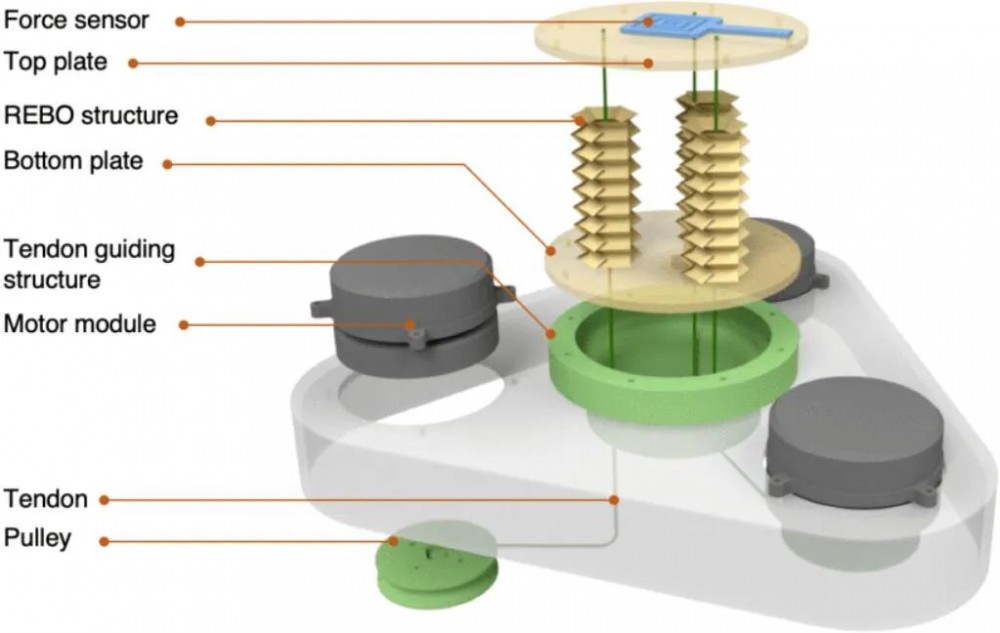
REBO的机器人平台由四部分组成:(a)三个双层REBO致动器 (b)直流电机模块和3D打印的滑轮系统(c)力传感器系统 (d)集成感测和控制的微处理器。三个REBO致动器被安装在顶部和底部的丙烯酸板之间并固定。钢筋束穿过致动器的结构通孔,一端固定在顶板上,另一端固定在安装在电动机上的皮带轮上。旋转电动机使致动器压缩或伸长,致动器线性运动的速度限制由电动机确定。将力传感器放置在顶板(球拍)上,以检测小球何时与顶板接触。
REBO正在“杂耍”的小球被限制在球拍上的管道内,只能进行垂直运动。为了使小球被弹的更高,在每次击打后,REBO会迅速回到预压缩位置,等待下一次的击打。这是因为在动力学中,每次击打小球后放松的球拍都会大大降低球的总能量,因此必须将额外的能量预加载到等待的弹簧REBO中,以便在每次击打时进行保持击球所需的功。
轻巧的可变形REBO结构具有可控制刚度的弹性,在数千次击球的过程中反复进行疲劳损失极少,这证明了高度可重复的渐近循环系统的稳定性。此外,由于REBO的刚度仅通过改变几何参数就可以改变一个数量级,因此尽管在所有不同的设计中都依赖单一的整体材料,也可以调整机械输出功率以适应各种应用。
研究团队将REBO的杂耍过程分为“飞行”和“命中”。在“飞行”模式下,发射的小球可以看作是无损失的衡重力状态。球发射后,REBO迅速重置回到其预压缩位置。当小球触发了球拍上的力传感器,系统进入“击打”模式时,球沿着压缩弹簧REBO,整个系统可以看作是弹簧上的质量。REBO的弹性能量传递给了球,当REBO的长度不再压缩时,“击打”模式结束,然后力传感器报告球已抬起,电机重新接合了肌腱,系统重新进入了“飞行”模式。REBO预压缩的位置越低,它存储的能量就越大,“击打”模式下更大的预压缩力可将更多的能量注入到球中,可以使小球弹得更高。除了击打小球外,REBO还可以倒置过来,摇身一变成为弹跳机器人。
